绝对值编码器介绍
绝对值编码器提供与轴位置相对应的二进制代码。也就是说,它读取磁盘的位置,而不是从一个位置到下一个位置的转换(与增量编码器一样)。因此,这些绝对值编码器即使在没有电源电压的情况下移动,也不会丢失它们所在的位置。
这是一个很大的优势,因为在电源故障后无需将机器定位在原点。
绝对值编码器工作原理
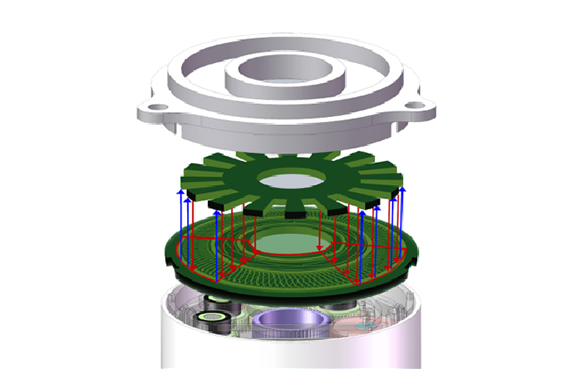
红外光发射器发出的光束穿过掩模和磁盘,在磁盘上,二进制代码丝印在与轴同心的圆形轨道上。
当磁盘(连接到编码器轴)旋转时,光电晶体管阵列接收当磁盘上的丝印轨道中断发光二极管发出的光束时产生的光和阴影。

在前面的草图中我们可以看到绝对值编码器的工作原理。可以看出,红外发光二极管发出的光穿过圆盘和掩模,落在光电晶体管上(编码器使用的二进制代码中有多少位)。

可以看出,磁盘被分成同心圆磁道。每个磁道(从最外层开始并朝向磁盘的中心)对应于正在使用的二进制代码的位。
黑色扇区在相应的光电晶体管上投下阴影,电子电路在相关位上提供逻辑“1”。
空白扇区允许光通过光电晶体管,电子设备为相应位提供逻辑“0”。
在图中的例子中,编码器正在读取的数字是:0 0 1 0 0 1
单圈和多圈绝对值编码器
到目前为止,我们已经看到绝对值编码器有一个与轴一体旋转的圆盘。但是当轴到达 360º 转弯的末端时会发生什么?
要回答这个问题,我们必须记住,关于这一点,编码器有两种类型:单圈编码器和多圈编码器。
让我们解释一下这意味着什么:
单圈编码器:
绝对值编码器在每一圈中提供磁盘内部的读数(步数)数。当他跑到最后一圈时,他又从头开始阅读。例如,假设编码器有一个 360 步的磁盘,那么它提供的序列如下:

也就是说,编码器信号的接收器知道圆盘每转一圈的位置,但不知道轴转了几圈或转了多少圈。
当编码器轴不会转动超过一圈或想要控制零件的转动角度(例如,360º 可调天线)时,使用这种类型的编码器。
多圈编码器:
这种类型的编码器不仅可以知道轴的位置,还可以知道它转了多少圈。
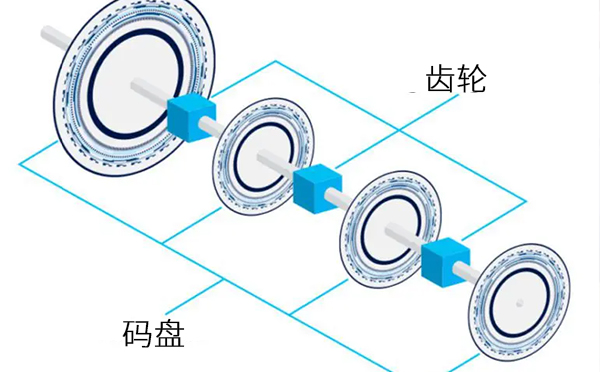
为了实现这一点,编码器内部除了指示每转步数的圆盘外,还有其他用于计算轴圈数的圆盘(具有不同的机械比率)。
这些辅助盘可以是一张、两张或三张,并且也使用与普通盘相同的二进制代码进行编码。
让我们看一个说明性的草图:

当多圈编码器有 16 圈时,它只有一个辅助盘。主盘每转 16 圈(轴转 16 圈),该盘就会转一整圈:
总圈数:16 x 1 = 16
一个 256 圈多圈编码器将携带两个辅助盘。主盘每转16圈(轴转16圈),第一副盘转一圈,第一副盘每转16圈,第二副盘转一圈:
总圈数:16 x 16 = 256
当一个多圈编码器有 4096 圈时,它将有三个辅助盘。每转16圈,下一个转一圈。所以:
总圈数 16 x 16 x 16 = 4,096
因此,知道了主盘每转的步数,我们就可以知道整个路径的最大步数:
示例 1:
我们将 1,024 步/转盘安装在 4,096 转多圈编码器上。
编码器将给出的读数(步数)总数是多少?
1,024 x 4,096 = 4,194,304 步
示例 2:
我们将 8,192 步/转盘安装在 4,096 转多圈编码器上。
编码器将给出的读数(步数)总数是多少?
8,192 x 4,096 = 33,554,432 步
因此,在了解给定应用所需的分辨率后,我们可以选择具有适当每转步数和转数的编码器,以获得最佳解决方案。
示例:假设我们要控制最大有效行程为 1,000 毫米的轴的位置,并且我们想要 0.001 毫米(千分之一毫米)的分辨率和精度。
另一方面,绝对值编码器轴的旋转与零件直线运动之间的机械关系是,运动部件每直线运动 2 毫米(10 圈 = 千分之 2,000),编码器轴旋转 10 圈。

因此,我们需要一个每转 4,096 步和超过 5,000 转(8,192 转)的多转编码器,因为:
编码器旋转 5,000 圈,使运动部件移动 1,000 毫米(1 米),并且由于它的分辨率为每圈 4,096 个读数,它会在路线结束时给出:
5,000 转 x 4,096 步 = 20,480,000 个读数
因此,要读取正确的位置(千分之一毫米),必须执行以下操作:
如果 20,480,000 个读数是……………………………… 1,000,000 千分之一毫米
1 个读数将是………………………………………… X “”
所以 X = 0.0488281
因此,计算出运动部件的实际位置(PR):PR = 读数 * 0.0488281 千分之毫米
这是读取绝对值编码器信号的设备(可编程逻辑控制器、CNC等)必须执行的操作。
让我们通过一个尺寸示例来检查得出的分辨率是否为千分之一毫米:
在某个时刻,控制器读取了数字 12,700,827。因此,如果我们执行公式来计算运动部件的实际位置,我们有:
PR = 12,700,827 * 0.0488281 = 620,157.25 千分之一毫米。
如果我们忽略小数点 (0.25),我们只会在 250 万分之一毫米的位置上出现误差。因此,我们输入了我们想要的分辨率和精度。
艾迪科编码器厂家,20年编码器生产研发经验,是集编码器研发、生产、销售与一体的“专、精、特、新”中小企业,公司目前供应:绝对值编码器、旋转编码器、光电编码器、增量编码器、以太网编码器、刀架编码器、齿轮感应式编码器、中空编码器、伺服电机编码器和拉线编码器。欢迎广大客户致电400客服专线:400-0631-226,洽谈合作。